Discover the SciOpen Platform and Achieve Your Research Goals with Ease.
Search articles, authors, keywords, DOl and etc.


 {{expandStatus?'Exit ':''}}Advanced Search
{{expandStatus?'Exit ':''}}Advanced Search
From Global Open Multi-Source Data to Network-Wide Traffic Flow: A Large-Scale Case Study across Multiple Cities
2026-02-20
Network-wide traffic flow, which represents the dynamic traffic volumes on each link of a road network, is fundamental to smart cities. However, the installed sensors are usually insufficient to cover the entire network due to the associated high installation and maintenance costs. Existing studies mainly address this challenge using private datasets from individual cities, which makes their methods typically face a trade-off challenge between accuracy and generality. Developing an open multi-source, cross-city traffic flow estimation framework is essential.
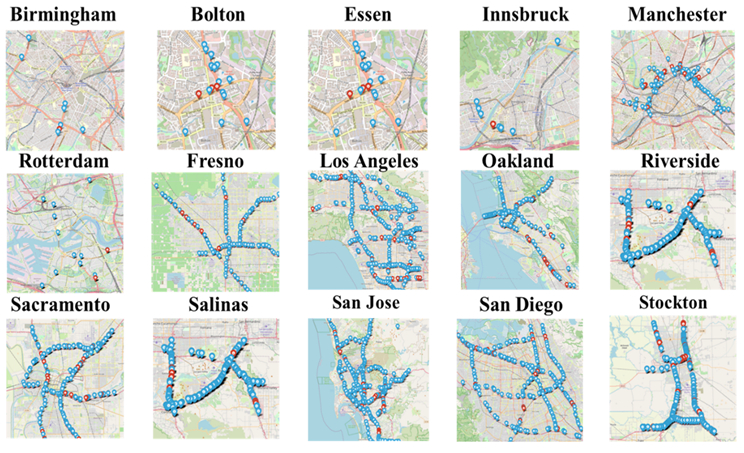
To address this, Associate Professor Wei Ma’s team at The Hong Kong Polytechnic University (including Dr. Zhenjie Zheng and Dr. Zijian Hu), in collaboration with Professor Monica Menendez from New York University, proposes a cross-city traffic flow estimation framework based on Global Open Multi-Source (GOMS) data. The study begins with a systematic literature review, identifying a core contradiction in the field: the trade-off between estimation accuracy and cross-city generalization. To resolve this, the study uncover strong correlations between road traffic flow and open multi-source urban characteristics, specifically: (1) urban building structures (from OpenStreetMap); (2) human activity (population density maps); (3) infrastructure connectivity (road network topology); and (4) dynamic traffic conditions (speed data). By leveraging these correlations, an attention-based graph neural network with novel triple cross-attention and dense connection blocks to effectively fuse and extract the static geographical and demographical information from GOMS maps. Additionally, the observed traffic data are encoded through graph spatial and temporal blocks that embed the spatial-temporal traffic dynamics information. The model is validated using data from 15 heterogeneous cities across Europe and North America. Results demonstrate stable and satisfactory estimation accuracy across these cities.
The team published their study (DOI: 10.1016/j.commtr.2025.100222) in Communications in Transportation Research on November 18, 2025.
We use three types of map images rather than traditional tabular data to incorporate richer and more comprehensive geographical and demographical information. These map images comprise OpenStreetMap (OSM), sensor distribution map, and population density map, including macro-level static geographical and demographical information such as POI, road topology, building footprints, sensor locations, population density, land cover, and so on. Importantly, these multi-source data are closely related to the traffic flow dynamics, which enables effective flow estimation. Accordingly, we develop an attention-based graph neural network with novel triple cross-attention and dense connection blocks to effectively fuse and extract the static geographical and demographical information from GOMS maps. Additionally, the observed traffic data are encoded through graph spatial and temporal blocks that embed the spatial-temporal traffic dynamics information.
Importance of GOMS data
To break the trade-off between accuracy and generality, we advocate the use of Global Open Multi-Source (GOMS) data for NTFE. The GOMS data mainly refers to the globally and publicly available geographical and demographical information, including multi-source datasets such as road topology, building footprints, and population density that contribute to NTFE. Importantly, these GOMS data can significantly enhance the NTFE accuracy, as the network-wide traffic flow data are either the cause or the consequence of the urban activities recorded in the GOMS data. Preliminary research utilizing GOMS data has also shown promising results in estimating land-use patterns and air pollution. In the context of NTFE, the employed GOMS data should meet two requirements: 1) The GOMS data should be widely available in multiple cities and therefore can address the generality issue; 2) The GOMS data should contain sufficient information to contribute to a more accurate NTFE.
Advantages of GOMS map images
Compared to traditional tabular GOMS data, GOMS map images offer a more effective representation of the NTFE. Specifically, GOMS map images naturally include spatial relationships between different elements in the network (e.g., road topology and bottleneck locations), which are essential for the extraction of rich spatial information in NTFE. In contrast, tabular data often struggles to capture these spatial relationships comprehensively and efficiently. The GOMS maps also contain extensive contextual information, such as geographic features and demographic patterns, that are difficult to express in tabular form. Typically, manual feature engineering is often required to extract the contextual information in tabular data, which can be both time-consuming and prone to human bias. Additionally, GOMS maps allow large amounts of data to be handled more efficiently. This scalability is particularly useful in NTFE, where traffic flow patterns need to be identified over large networks. More importantly, deep learning methods trained on map images tend to show satisfying generalization ability in various urban studies, especially when faced with unseen network conditions. To summarize, these advantages make GOMS maps particularly powerful in NTFE, where the complexity and dynamic nature of flow patterns can be better captured and modeled.
Satisfactory estimation accuracy across cities
We evaluate the proposed method across 15 cities in Europe and North America. Results show that the average, minimum, and maximum mean absolute percentage errors among all cities are 23%, 17%, and 27%, respectively. The stable and satisfactory estimation accuracy in multiple cities demonstrates that the trade-off challenge can be successfully addressed using our approach. It is also found that the estimation accuracy is impacted by several underlying factors, such as data quality, sensor coverage, and urban layouts.
The above research is published in Communications in Transportation Research (COMMTR), which is a fully open access journal co-published by Tsinghua University Press and Elsevier. COMMTR publishes peer-reviewed high-quality research representing important advances of significance to emerging transport systems. COMMTR is also among the first transportation journals to make the Replication Package mandatory to facilitate researchers, practitioners, and the general public in understanding and advancing existing knowledge. At its discretion, Tsinghua University Press will pay the open access fee for all published papers in 2025.
-
All-fluorinated electrolyte unlocks the potential of high-voltage lithium metal batteries
2026-04-09 Energy Materials and Devices -
From Thickness Regulation to Performance Breakthough: An Innovative Piezo-Catalytic Pathway via Interface Polarization Enhancement in Bi2WO6
2026-04-03 Journal of Advanced Ceramics -
Recent progress of reversible thermochromic hydrogels and their application in smart windows
2026-03-25 Nano Research -
Avoiding Nature’s Minsky Moment: How NatureFinTech is turning ecosystem integrity into investable capital
2026-03-20 Technology Review for Carbon Neutrality -
From Tradition to Precision: Atlas of "Food and Medicine Homology" in 2026
2026-03-12 Food & Medicine Homology






 京公网安备11010802044758号
京公网安备11010802044758号